輸入電壓115-230VAC
電流0-5A
輸出電壓0-180VDC
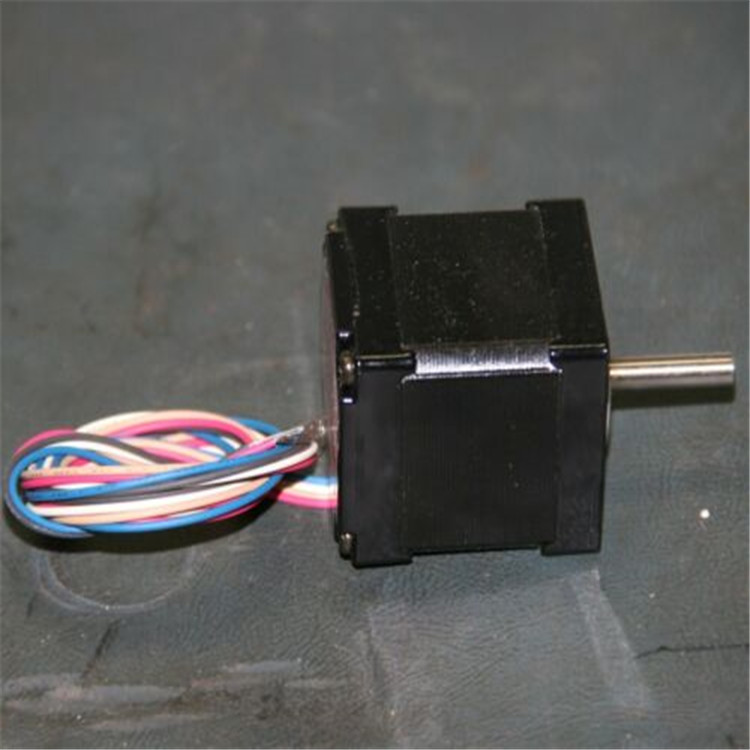
適配電機直流電機
適用場合機械傳動
材質不銹鋼和銅
電機響應時間0.1秒
驅動器輸出方式電壓輸出
驅動器電壓24VDC
驅動器電流5A
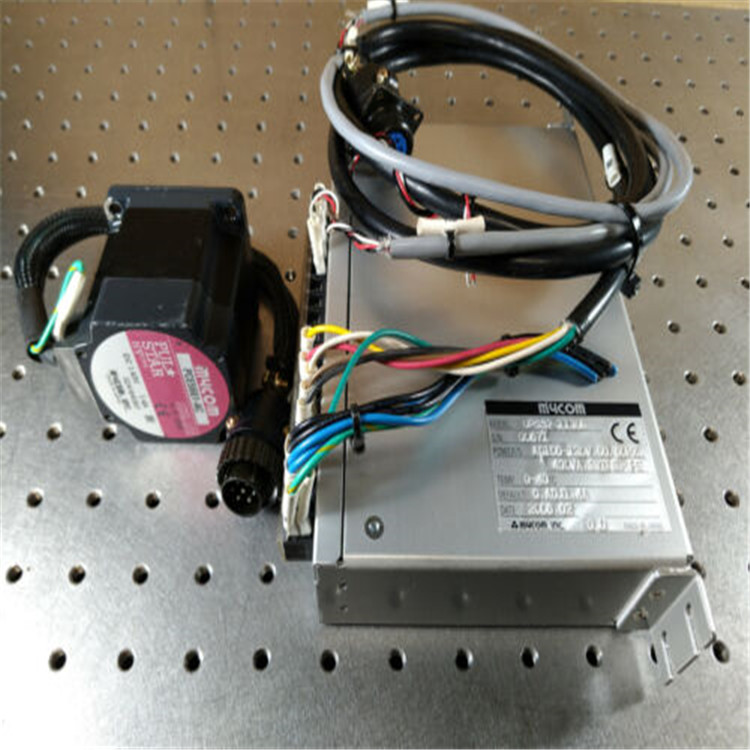
MYCOM驅動器其它特性還有慣頻特性、起動頻率特性等。 電機一旦選定,電機的靜力矩確定,而動態力矩卻不然,電機的動態力矩取決于電機運行時的平均電流(而非靜態電流),平均電流越大,電機輸出力矩越大,即電機的頻率特性越硬。要使平均電流大,盡可能提高驅動電壓,采用小電感大電流的電機。7、電機的共振點:步進電機均有固定的共振區域,二、四相感應子式的共振區一般在180-250pps之間(步距角1.8度)或在400pps左右(步距角為0.9度),電機驅動電壓越高,電機電流越大,負載越輕,電機體積越小,則共振區向上偏移,反之亦然,為使電機輸出電矩大,不失步和整個系統的噪音降低,一般工作點均應偏移共振區較多。
IMS500-020
UPS502-1
IMS500-120
UPS503-0
UPS503-1
SD44-110
IMS20-210
SD45-210
SD45-410
SD45-610
IMS200-220
SNC-100A
MNC-100
SNC-110
SNC-200

INS500-120
INS500-020-533EA
INS500-020-535EA
INS500-020-543AC
ICD200-1120A
CMS-100
MMC-200
MMC-400
SNC-240
SNC-440
MNC-110
ECM-100

自適應控制是在 20 世紀 50 年代發展起來的自動控制領域的一個分支 。它是隨著控制對象的復雜化 ,當動態特性不可知或發生不可預測的變化時 ,為得到高性能的控制器而產生的 。其主要優點是容易實現和自適應速度快 ,能有效地克服電機模型參數的緩慢變化所引起的影響 ,是輸出信號跟蹤參考信號 。文獻研究者根據步進電機的線性或近似線性模型推導出了全局穩定的自適應控制算法 , 這些控制算法都嚴重依賴于電機模型參數 。文獻將閉環反饋控制與自適應控制結合來檢測轉子的位置和速度 , 通過反饋和自適應處理 ,按照優化的升降運行曲線 , 自動地發出驅動的脈沖串 ,提高了電機的拖動力矩特性 ,同時使電機獲得的位置控制和較高較平穩的轉速 。
IMS51-110-5961AC(BC)
IMS51-110-5991AC(BC)
IMS51-110-59131AC(BC)
IMS51-210-5692AC(BC)
IMS51-210-5962AC(BC)
IMS51-210-5992AC(BC)
IMS51-210-59132AC(BC)
IMS51-120-5641AC(BC)
IMS51-120-5661AC(BC)
IMS51-120-5691AC(BC)
IMS51-120-5961AC(BC)
IMS51-120-5991AC(BC)
IMS51-120-59131AC(BC)
IMS51-220-5692AC(BC)
IMS51-220-5962AC(BC)
IMS51-220-5992AC(BC)
SNC-200CP
ECM-011
SND100-220L
SND100
SND101
SND102
SND110
SND111
SND112
INS50-110
INS50-210
INS50-120
INS50-220
INS50-110-5641AC(BC)
INS50-110-5661AC(BC)
INS50-110-5691AC(BC)
INS50-110-5961AC(BC)
INS50-110-5991AC(BC)
INS50-110-59131AC(BC)
開關量主要指開入量和開出量,是指一個裝置所帶的點,譬如變壓器的溫控器所帶的繼電器的點(變壓器超溫后變位)、閥門凸輪開關所帶的點(閥門開關后變位),接觸器所帶的點(接觸器動作后變位)、熱繼電器(熱繼電器動作后變位),這些點一般都傳給PLC或綜保裝置,電源一般是由PLC或綜保裝置提供的,自己本身不帶電源,所以叫無源接點,也叫PLC或綜保裝置的開入量。
在時間上和數量上都是離散的物理量稱為數字量。把表示數字量的信號叫數字信號。把工作在數字信號下的電子電路叫數字電路。例如:用電子電路記錄從自動生產線上輸出的零件數目時,每送出一個零件便給電子電路一個信號,使之記1,而平時沒有零件送出時加給電子電路的信號是0,所在為記數。可見,零件數目這個信號無論在時間上還是在數量上都是不連續的,因此他是一個數字信號。小的數量單位就是1個。
http://m.china-westdev.com