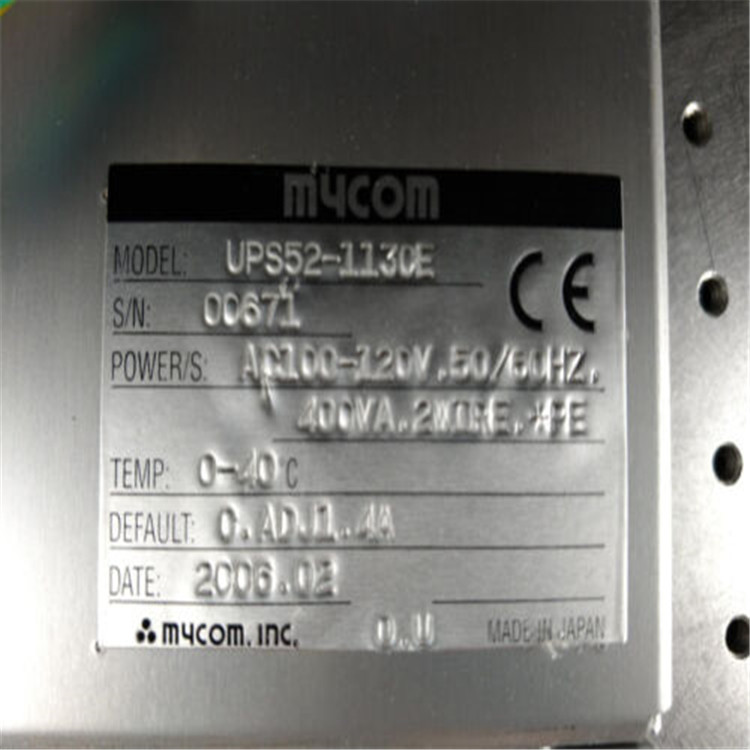
輸入電壓115-230VAC
電流0-5A
輸出電壓0-180VDC
適配電機直流電機
適用場合機械傳動
材質不銹鋼和銅
電機響應時間0.1秒
驅動器輸出方式電壓輸出
驅動器電壓24VDC
驅動器電流5A
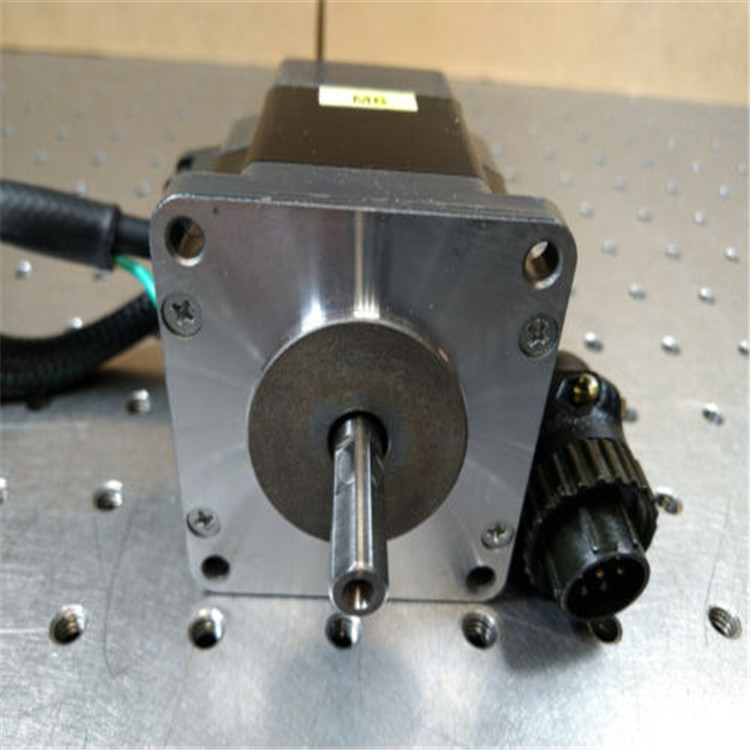
MYCOM步進電機作為一種控制用的特種電機,步進電機無法直接接到直流或交流電源上工作,必須使用的驅動電源步進電機驅動器。在微電子技術,特別計算機技術發展以前,控制器脈沖信號發生器完全由硬件實現,控制系統采用單的元件或者集成電路組成控制回路,不僅調試安裝復雜,要消耗大量元器件,而且一旦定型之后,要改變控制方案就一定要重新設計電路。 這就使得需要針對不同的電機開發不同的驅動器,開發難度和開發成本都很高,控制難度較大,限制了步進電機的推廣。
IMS500-020
UPS502-1
IMS500-120
UPS503-0
UPS503-1
SD44-110
IMS20-210
SD45-210
SD45-410
SD45-610
IMS200-220
SNC-100A
MNC-100
SNC-110
SNC-200

INS20-210L-265A(B)
INS20-210L-268A(B)
PF243-A(B)
PF244-A(B)
PEE535-A(B)
GTS500-020-543AC(BC)
GTS500-020-544AC(BC)
GTS500-020-545AC(BC)
GTS500-120-564AC(BC)
GTS500-120-566AC(BC)
GTS500-120-569AC(BC)
PF564-AC(BC)

具有良好制動效能穩定(制動因數與摩擦系數成線性關系)性、在各種路面上都有良好的制動表現、結構簡單維修方便等優點,在現代車輛和工程機械設備上得到了廣泛的應用。在乘用車上的大多都是接觸式摩擦制動器,它利用液體用力作為動力源,通過液力來推動摩擦片與制動盤相接觸,使汽車減速或者停車。
時滯問題摩擦制動器在開始制動時,存在時滯問題,即從司機踩下制動路板之后到汽車開始減速存在著一段時間。磨損問題汽車在高速的工況下進行制動,摩擦塊磨損加劇,而且由于溫度升高還出現制動效能降低的現象。摩擦熱摩擦制動器在工作中產生大量的摩擦熱 可以使制動器的工作表面產生局部高溫,表面氧化甚至熱疲勞磨損終使摩擦制動器失效 所以研究溫度對摩擦制動器性能的影響有重要意義。而摩擦制動器溫度是一個很復雜的問題 涉及的學科面很廣需要多學科綜合運用特別是計算機,數學,物理,化學及材料學等學科的靈活運用 。
MLN20-210-464A(B)
MLN20-210-466A(B)
MLN20-210-468A(B)
PF464-02A(B)
PF466-02A(B)
PF468-02A(B)
MLN50-110
MLN50-120
MLN50-110-5641AC(BC)
MLN50-110-5661AC(BC)
MLN50-110-5691AC(BC)
MLN50-110-5961AC(BC)
MLN50-110-5991AC(BC)
MLN50-110-59131AC(BC)
MLN50-120-5641AC(BC)
MLN50-120-5661AC(BC)
INS500-020-544AC(BC)
INS500-020-545AC(BC)
PF543-AC(BC)
PF544-AC(BC)
PF545-AC(BC)
INS500-120-5641AC(BC)
INS500-120-5661AC(BC)
INS500-120-5691AC(BC)
PCE59132-AC(BC)
INS20-010(L)
INS20-210(L)
INS20-210L-243A(B)
INS20-210L-244A(B)
INS20-210L-245A(B)
INS20-210L-264A(B)
離線編程方式:可編程邏輯控制器和編程器公用一個CPU,編程器在編程模式時,CPU只為編程器提供服務,不對現場設備進行控制。完成編程后,編程器切換到運行模式,CPU對現場設備進行控制,不能進行編程。離線編程方式可降低系統成本,但使用和調試不方便。在線編程方式:CPU和編程器有各自的CPU,主機CPU負責現場控制,并在一個掃描周期內與編程器進行數據交換,編程器把在線編制的程序或數據發送到主機,下一掃描周期,主機就根據新收到的程序運行。這種方式成本較高,但系統調試和操作方便,在大中型可編程邏輯控制器中常采用。
http://m.china-westdev.com