輸入電壓115-230VAC
電流0-5A
輸出電壓0-180VDC
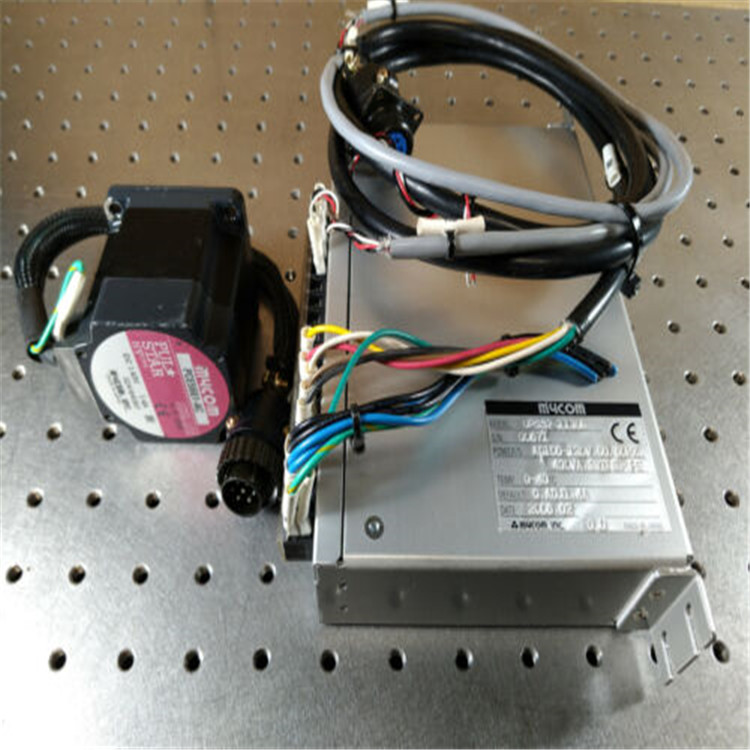
適配電機(jī)直流電機(jī)
適用場(chǎng)合機(jī)械傳動(dòng)
材質(zhì)不銹鋼和銅
電機(jī)響應(yīng)時(shí)間0.1秒
驅(qū)動(dòng)器輸出方式電壓輸出
驅(qū)動(dòng)器電壓24VDC
驅(qū)動(dòng)器電流5A
MYCOM步進(jìn)電機(jī)和驅(qū)動(dòng)器的選擇方法:判斷需多大力矩:靜扭矩是選擇步進(jìn)電機(jī)的主要參數(shù)之一。負(fù)載大時(shí),需采用大力矩電機(jī)。力矩指標(biāo)大時(shí),電機(jī)外形也大。判斷電機(jī)運(yùn)轉(zhuǎn)速度:轉(zhuǎn)速要求高時(shí),應(yīng)選相電流較大、電感較小的電機(jī),以增加功率輸入。且在選擇驅(qū)動(dòng)器時(shí)采用較高供電電壓。選擇電機(jī)的安裝規(guī)格:如57、86、110等,主要與力矩要求有關(guān)。確定定位精度和振動(dòng)方面的要求情況:判斷是否需細(xì)分,需多少細(xì)分。
INS500-020-544AC(BC)
INS500-020-545AC(BC)
PF543-AC(BC)
PF544-AC(BC)
PF545-AC(BC)
INS500-120-5641AC(BC)
INS500-120-5661AC(BC)
INS500-120-5691AC(BC)
PCE59132-AC(BC)
INS20-010(L)
INS20-210(L)
INS20-210L-243A(B)
INS20-210L-244A(B)
INS20-210L-245A(B)
INS20-210L-264A(B)
PF264-A
PF265-A
PF268-A
INS200-030L
INS200-230L
INS200-230L-243A
INS200-230L-244A
INS200-230L-245A
INS200-230L-264A
INS200-230L-265A
INS200-230L-268A

由于PLC主要用于現(xiàn)場(chǎng)控制,所以采集現(xiàn)場(chǎng)數(shù)據(jù)是十分必要的功能,在此基礎(chǔ)上將PLC與上位計(jì)算機(jī)或觸摸屏相連接,既可以觀察這些數(shù)據(jù)的當(dāng)前值,又能及時(shí)進(jìn)行統(tǒng)計(jì)分析,有的PLC具有數(shù)據(jù)記錄單元,可以用一般個(gè)人電腦的存儲(chǔ)卡插入到該單元中保存采集到的數(shù)據(jù)。PLC的另一個(gè)特點(diǎn)是自檢信號(hào)多.利用這個(gè)特點(diǎn),PLC控制系統(tǒng)可以實(shí)現(xiàn)白診斷式,減少系統(tǒng)的故障,提高系統(tǒng)的可靠性。
IMS203-220(F)L-243A(B)
IMS203-220(F)L-244A(B)
IMS203-220(F)L-244HA(B)
IMS203-220(F)L-264A(B)
IMS203-220(F)L-265A(B)
IMS203-220(F)L-268A(B)
IMS203-220L
IMS203-420L
IMS203-420FL
IMS20-210(L)
IMS20-210-243A(B)
IMS20-210-244A(B)
IMS20-210-245A(B)
IMS20-210-264A(B)
IMS20-210-265A(B)
IMS20-210-268A(B)
PS245-A(B)
PLC的選擇主要應(yīng)從PLC 的機(jī)型、容量、I/O模塊、電源模塊、功能模塊、通信聯(lián)網(wǎng)能力等方面加以綜合考慮。PLC機(jī)型選擇的基本原則是在滿(mǎn)足功能要求及保證可靠、維護(hù)方便的前提下,力爭(zhēng)佳的性能價(jià)格比。選擇時(shí)應(yīng)主要考慮到合理的結(jié)構(gòu)型式,安裝方式的選擇,相應(yīng)的功能要求,響應(yīng)速度要求,系統(tǒng)可靠性的要求,機(jī)型盡量統(tǒng)一等因素。
IMS50-210-5962AC(BC)
IMS50-210-5992AC(BC)
IMS50-210-59132AC(BC)
IMS50-120-5641AC(BC)
IMS50-120-5661AC(BC)
IMS50-120-5691AC(BC)
IMS50-120-5961AC(BC)
IMS50-120-5991AC(BC)
IMS50-120-59131AC(BC)
IMS50-220-5692AC(BC)
在可編程邏輯控制器系統(tǒng)設(shè)計(jì)時(shí),首先應(yīng)確定控制方案,下一步工作就是可編程邏輯控制器工程設(shè)計(jì)選型。工藝流程的特點(diǎn)和應(yīng)用要求是設(shè)計(jì)選型的主要依據(jù)。可編程邏輯控制器及有關(guān)設(shè)備應(yīng)是集成的、標(biāo)準(zhǔn)的,按照易于與工業(yè)控制系統(tǒng)形成一個(gè)整體,易于擴(kuò)充其功能的原則選型所選用可編程邏輯控制器應(yīng)是在相關(guān)工業(yè)領(lǐng)域有投運(yùn)業(yè)績(jī)、成熟可靠的系統(tǒng),可編程邏輯控制器的系統(tǒng)硬件、軟件配置及功能應(yīng)與裝置規(guī)模和控制要求相適應(yīng)。熟悉可編程序控制器、功能表圖及有關(guān)的編程語(yǔ)言有利于縮短編程時(shí)間,因此,工程設(shè)計(jì)選型和估算時(shí),應(yīng)詳細(xì)分析工藝過(guò)程的特點(diǎn)、控制要求,明確控制任務(wù)和范圍確定所需的操作和動(dòng)作,然后根據(jù)控制要求,估算輸入輸出點(diǎn)數(shù)、所需存儲(chǔ)器容量、確定可編程邏輯控制器的功能、外部設(shè)備特性等,后選擇有較高性能價(jià)格比的可編程邏輯控制器和設(shè)計(jì)相應(yīng)的控制系統(tǒng)。
http://m.china-westdev.com



福樂(lè)磁開(kāi)關(guān) | Conductix穩(wěn)福樂(lè)設(shè)備銷(xiāo)售")
特賣(mài)")
口特價(jià)")



